La evolución de la atención médica ha sido impulsada por innovaciones tecnológicas que buscan mejorar la experiencia del paciente. En los últimos años, la robótica afectiva, un campo que combina técnicas de inteligencia artificial, reconocimiento emocional e interacción humano-robot, ha surgido como uno de los frentes más prometedores para humanizar los entornos de atención y promover el bienestar del paciente.
La base conceptual de la robótica afectiva está vinculada a la computación afectiva, término introducido por Picard en 1997 (1), quien propuso por primera vez sistemas capaces de detectar, procesar y responder a las emociones humanas. Más tarde, en 2003, Breazeal (2) definió formalmente el campo de la robótica afectiva al describir cómo dotar a los robots de expresiones emocionales y mecanismos de empatía artificial. Desde entonces, varios investigadores han contribuido teórica y experimentalmente al avance del área, desarrollando sistemas robóticos que reconocen, interpretan y reaccionan sensiblemente a los estados emocionales de sus usuarios. Los primeros trabajos enfatizaron las funciones de entretenimiento y compañía, pero pronto evolucionaron hacia aplicaciones clínicas, particularmente en geriatría y pediatría (3) (4).
Los robots afectivos pueden entenderse como una subcategoría dentro de la familia de robots de asistencia social. Mientras que los robots de servicio están diseñados principalmente para realizar tareas (limpieza, transporte, vigilancia), los robots de asistencia social se centran en crear un sentido de pertenencia y presencia con el usuario. En este contexto, los robots afectivos van más allá de actuar como coadyuvantes terapéuticos al ofrecer apoyo a las necesidades emocionales de los pacientes, facilitar la comunicación y promover sentimientos de acogida y compañerismo (5). Su actuación es especialmente eficaz en contextos de aislamiento social, como ocurre con personas mayores institucionalizadas, niños con trastornos del espectro autista y pacientes hospitalizados que pasan largos periodos de hospitalización.
Al mismo tiempo, es importante comprender cómo el entorno construido puede influir y ser influenciado por la introducción de estos sistemas. La incorporación de robots afectivos en entornos de cuidado requiere adaptaciones físicas, espaciales y sensoriales que favorezcan la interacción fluida y empática entre humanos y robots. Esto implica pensar en zonas de proximidad, accesibilidad, fluidez de circulación, control de estímulos sensoriales y soportes tecnológicos invisibles, como conectividad de datos, sensores ambientales y superficies adaptables. De esta forma, el diseño arquitectónico puede convertirse en un facilitador activo de la mediación robótica, optimizando tanto la eficiencia clínica como la comodidad subjetiva de los usuarios.
Este artículo analiza cómo se puede adaptar la arquitectura hospitalaria para facilitar la implementación de asistentes robóticos afectivos y analiza su impacto en el bienestar físico y psicológico de los pacientes. Para ello, se revisaron estudios sobre robótica afectiva y el papel del entorno construido en la humanización de la atención hospitalaria, con vistas a desarrollar espacios de salud más empáticos, receptivos y tecnológicamente preparados para el futuro.
Robots afectivos disponibles comercialmente
En las últimas décadas, el mercado de robots afectivos se ha expandido significativamente, impulsado por los avances en inteligencia artificial, la miniaturización de sensores y la creciente demanda de tecnologías capaces de ofrecer apoyo emocional y social.
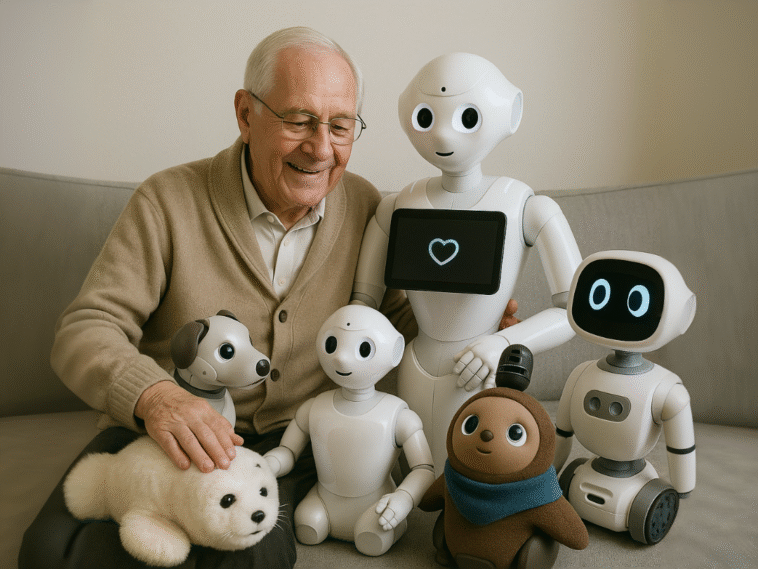
Uno de los modelos más consolidados es Paro (Imagen 1), un robot terapéutico desarrollado en Japón por Takanori Shibata en el Instituto Nacional de Ciencia y Tecnología Industrial Avanzada (AIST). Paro, que parece una cría de foca, está equipado con sensores táctiles, auditivos y visuales, así como actuadores que le permiten expresar movimientos suaves y vocalizaciones. Su linda forma y comportamientos receptivos tienen como objetivo promover el bienestar emocional, siendo ampliamente utilizado en instituciones geriátricas para reducir la ansiedad, la soledad y los síntomas depresivos entre los ancianos, especialmente aquellos que viven con demencia (6) (7).

Otro robot pionero es Aibo (Imagen 2), desarrollado por Sony y lanzado originalmente en 1999. Inspirado en un cachorro, Aibo combina movilidad avanzada con sensores de visión, audición y tacto, así como algoritmos de aprendizaje que le permiten desarrollar su propia personalidad a lo largo de las interacciones con su dueño. Aibo reconoce rostros, responde a comandos de voz y expresa estados emocionales, brindando una experiencia de vínculo similar a la de una mascota (8).

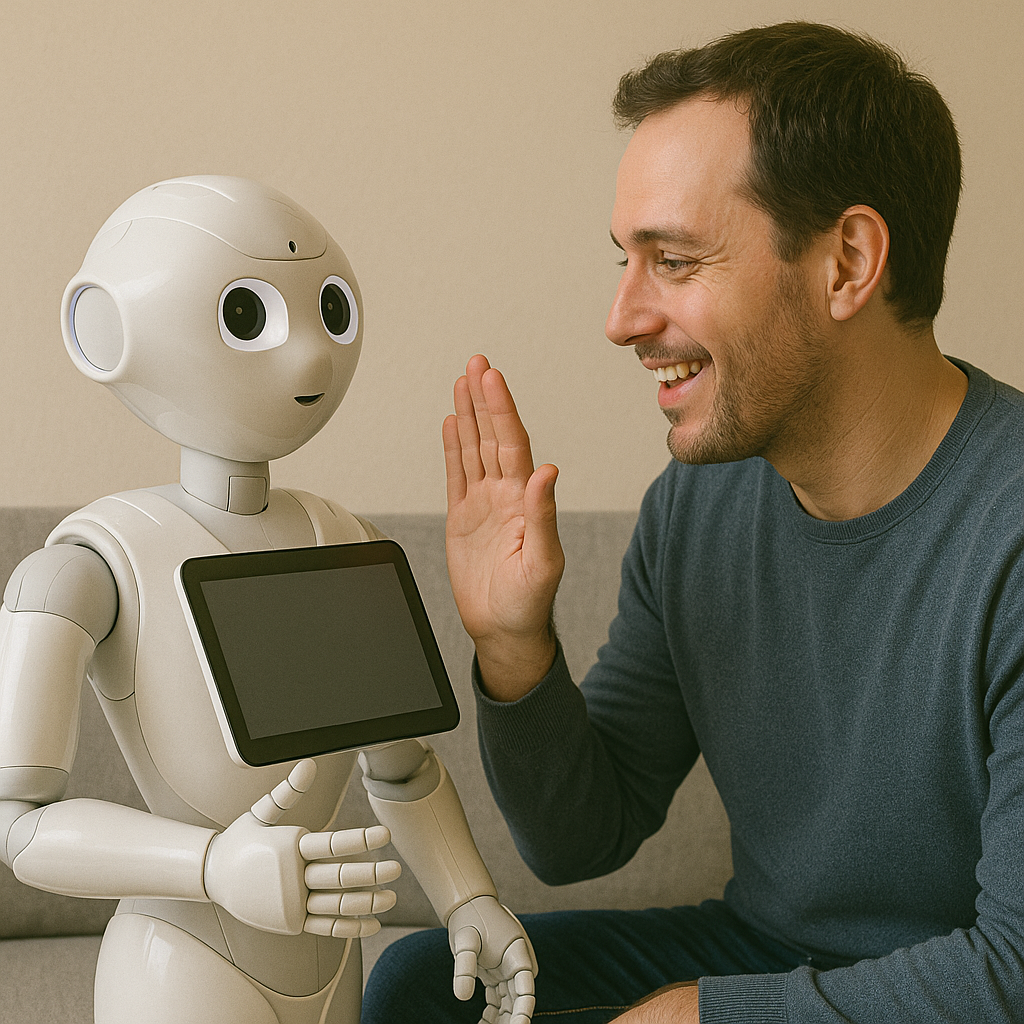
Pepper (Imagen 3), creado por SoftBank Robotics, es un robot humanoide con la capacidad de reconocer las emociones humanas y adaptar su comunicación según el estado de ánimo del usuario. Lanzado en 2014, Pepper cuenta con cámaras, sensores táctiles y micrófonos, además de una interfaz programable que permite personalizar sus funciones para diferentes contextos. Se utiliza en hospitales, escuelas y puntos de atención al cliente, ayudando a crear entornos más acogedores y receptivos. Estudios indican su uso con ancianos y niños, reforzando su eficacia en la mediación de las interacciones sociales (9) (10).
En el panorama europeo destaca Buddy (Imagen 4), un robot emocional desarrollado por la empresa francesa Blue Frog Robotics. Diseñado con características expresivas y un lenguaje corporal amigable, Buddy está dirigido principalmente a los niños, con el objetivo de facilitar el desarrollo de habilidades emocionales y sociales. Equipado con reconocimiento facial, sensores de proximidad y un sistema de voz interactivo, el robot ayuda a crear rutinas predecibles y ofrece comentarios positivos durante las interacciones (11).

Otro modelo relevante es el Lovot (Imagen 5), creado por la compañía japonesa Groove X. Con una apariencia que mezcla elementos de animales y personajes de fantasía, como un unicornio robótico, el Lovot está enfocado exclusivamente a crear vínculos emocionales. Equipado con más de 50 sensores, entre cámaras térmicas, sensores táctiles y un sistema de movimiento autónomo, reacciona a la presencia humana con comportamientos cariñosos, buscando afecto, emitiendo sonidos y suaves expresiones faciales (12).

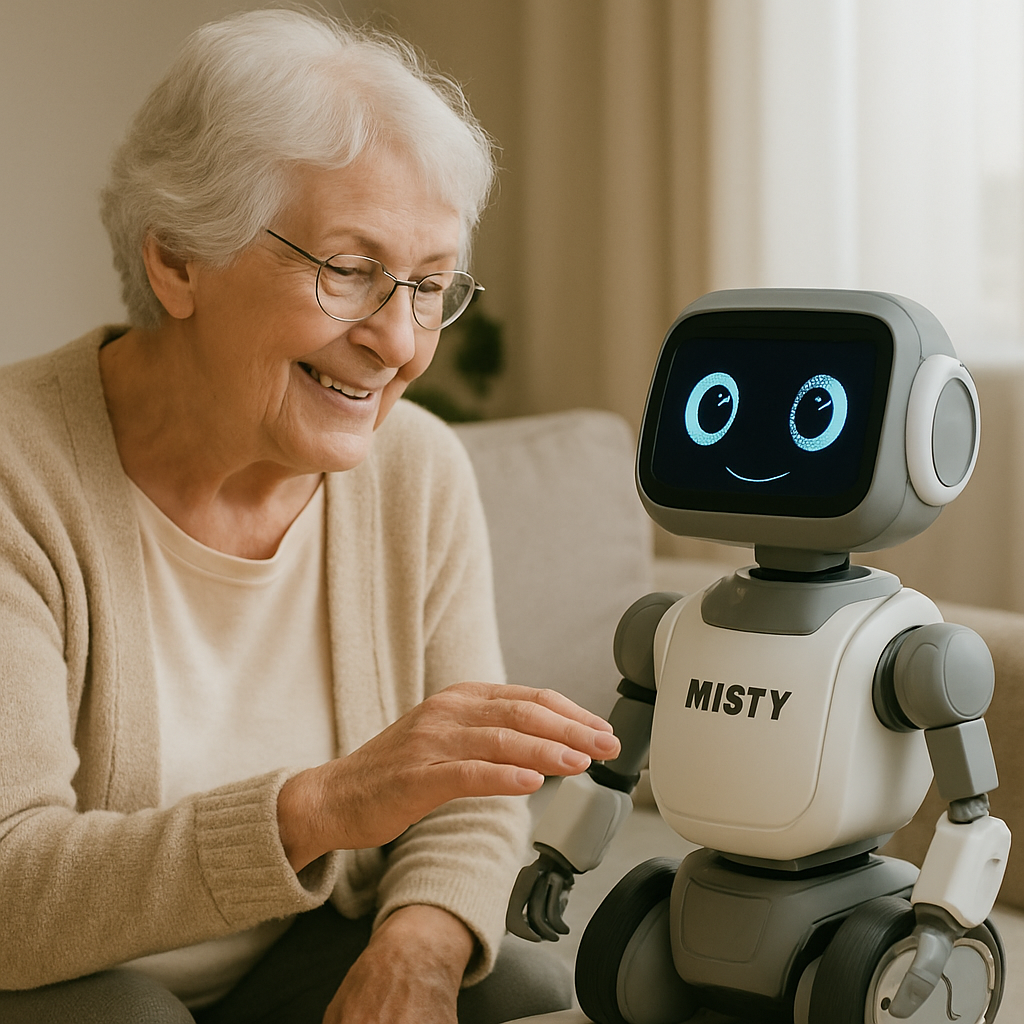
Por último, Misty (Imagen 6), desarrollado por Misty Robotics, representa un gran avance en la robótica afectiva con fuertes capacidades de personalización. Equipada con una cámara 4K, sensores de profundidad, panel táctil, micrófonos de campo lejano, LED y una pantalla facial programable, Misty está diseñada para mapeo de salas, reconocimiento facial y respuesta a comandos verbales. Su arquitectura abierta permite la creación de aplicaciones específicas para contextos como hospitales y centros de rehabilitación, convirtiéndolo en un robot altamente adaptable (13).
En conjunto, estos robots ejemplifican la diversidad funcional y estética de la robótica afectiva. El potencial de estos dispositivos para enriquecer las experiencias humanas, especialmente en entornos de atención, apunta a una nueva era en la que la tecnología juega un papel activo en la promoción del bienestar emocional y la humanización de las interacciones.
Beneficios de los robots afectivos para el bienestar del paciente
La presencia de robots afectivos en entornos asistenciales se ha asociado progresivamente con efectos positivos en el bienestar físico, emocional y social de los pacientes. A diferencia de las tecnologías de asistencia convencionales, los robots afectivos están diseñados para interacciones empáticas y socialmente significativas, lo que permite el establecimiento de vínculos emocionales y promueve experiencias de atención más humanizadas. Estudios demuestran que estas interacciones son capaces de reducir sentimientos de soledad, estrés y ansiedad, además de contribuir a la mejora de indicadores clínicos en poblaciones vulnerables, como ancianos institucionalizados y niños con trastornos del neurodesarrollo (7) (14).
Uno de los beneficios más recurrentes documentados en la literatura está relacionado con la reducción del estrés y la ansiedad en contextos hospitalarios. El robot Paro, por ejemplo, ha sido ampliamente utilizado en cuidados de larga duración, unidades psiquiátricas y de rehabilitación, mostrando eficacia en la reducción de los síntomas depresivos y la regulación de las emociones en pacientes con demencia (15) (16). Además, las interacciones táctiles favorecen la liberación de oxitocina y la reducción de cortisol, promoviendo un estado de relajación y bienestar fisiológico (17).
Entre las personas mayores, se han utilizado robots afectivos como Pepper y Buddy en programas de socialización y estimulación cognitiva. La capacidad de estos dispositivos para reconocer expresiones emocionales, responder a comandos de voz y mantener conversaciones sencillas ayuda a preservar las funciones cognitivas y aumentar la motivación para las actividades diarias (4). Los estudios también informan una reducción de la sensación de aislamiento social, una mayor autoestima y una mejor calidad del sueño entre los usuarios (18) (19).
Además, los robots afectivos han demostrado ser eficaces como facilitadores de terapias no farmacológicas, con el potencial de reducir la medicalización excesiva, especialmente en pacientes con demencia o trastornos de ansiedad. Este enfoque es coherente con la búsqueda de prácticas centradas en la persona y atención integral en el sistema de salud (20).
Es importante destacar que los beneficios de los robots afectivos no se limitan a los pacientes. Los profesionales de la salud también reportan impactos positivos, como reducción de la carga emocional, facilitación del vínculo terapéutico y mayor adherencia del paciente a las rutinas clínicas (14). De este modo, los robots afectivos se configuran como tecnologías complementarias al cuidado humano, y no como sustitutos, reafirmando el papel central de la empatía y la aceptación en el proceso terapéutico.
Estos hallazgos apuntan a la relevancia de considerar a los robots afectivos como parte integral de las estrategias de humanización hospitalaria y promoción del bienestar, especialmente cuando se insertan en entornos diseñados para favorecer el confort emocional, la interacción social y la privacidad, dimensiones que pueden ser potenciadas por una arquitectura sensible a las necesidades emocionales de los pacientes.
Sinergia entre la arquitectura hospitalaria y la robótica afectiva
La integración entre la arquitectura hospitalaria y la robótica afectiva constituye una frontera prometedora para promover el bienestar y la humanización en la atención médica. Esta sinergia se basa en el reconocimiento de que los entornos físicos influyen en las experiencias emocionales, conductuales y fisiológicas de los pacientes, y que los robots afectivos pueden actuar como mediadores de estas experiencias al interactuar con los usuarios de una manera sensible y receptiva. Consideradas de manera integrada, la arquitectura y la robótica afectiva pueden potenciar mutuamente sus efectos, promoviendo un entorno terapéutico que estimule el confort emocional, la seguridad, la autonomía y los vínculos interpersonales significativos.
El campo de la arquitectura sanitaria ha reconocido durante décadas los efectos del entorno construido sobre los resultados clínicos, mostrando que variables como la luz natural, el control acústico, la presencia de elementos naturales, la organización espacial y la privacidad se asocian con menores niveles de estrés, reducción de estancias hospitalarias y mejor calidad del sueño (21) (22). Por otro lado, la robótica afectiva, al introducirse en estos espacios, ofrece una nueva capa de mediación emocional y social, actuando como catalizador de estímulos positivos, especialmente en contextos donde el contacto humano es limitado, como en las unidades de cuidados intensivos.
Para que la presencia de robots afectivos sea efectiva, el entorno debe fomentar las interacciones. Los espacios de vida acogedores con buena acústica y muebles accesibles permiten a los pacientes y cuidadores interactuar con los robots de forma más espontánea y cómoda (7). En unidades geriátricas, por ejemplo, robots como Paro o Buddy son mejor recibidos en entornos que se asemejen a una atmósfera doméstica, con colores suaves, iluminación difusa y una distribución espacial que fomente la socialización (15).
Además, la arquitectura del hospital puede planificarse para incorporar tecnologías que respalden el funcionamiento de la robótica afectiva. Esto incluye la planificación de una infraestructura eléctrica y de conectividad adecuada, áreas de carga y almacenamiento para dispositivos y la planificación del flujo físico para garantizar que el movimiento del robot no interfiera con las rutinas clínicas. Así, la sinergia entre la arquitectura hospitalaria y la robótica afectiva no se limita a la coexistencia de estos elementos en un mismo espacio físico. Se trata de una interacción estratégica y planificada, en la que la espacialidad está diseñada para acoger y potenciar la experiencia de cuidado mediada por robots sociales.
Consideraciones finales
La creciente inserción de la robótica afectiva en el ámbito de la salud supone un avance significativo hacia la humanización de la atención mediada por tecnologías. Como se comenta a lo largo de este artículo, se han desarrollado robots afectivos con diferentes formas, funcionalidades y grados de interacción social, orientados principalmente al apoyo emocional, la estimulación cognitiva, la distracción y el compañerismo en contextos hospitalarios y asistenciales. Sus beneficios ya han sido observados en varias poblaciones, destacando su potencial terapéutico y psicoafectivo.
Más que dispositivos aislados, los robots afectivos deben entenderse como parte de un ecosistema de cuidado que involucra múltiples dimensiones: técnica, emocional, relacional y espacial. En este sentido, la arquitectura hospitalaria juega un papel importante en la mediación de las interacciones hombre-máquina, al crear entornos que favorecen la aceptación, el compromiso y la seguridad durante el uso de estos dispositivos.
Sin embargo, a pesar de los avances, aún quedan importantes desafíos por afrontar, como cuestiones éticas relacionadas con la privacidad y autonomía de los usuarios, limitaciones tecnológicas respecto a la sensibilidad afectiva de los robots y la necesidad de protocolos interdisciplinarios que guíen su integración en los flujos clínicos y espacios físicos.
La robótica afectiva, combinada con un diseño ambiental sensible y bien planificado, puede contribuir a transformar el entorno hospitalario en un espacio más humano, receptivo y tecnológicamente inteligente. La articulación entre ciencia, tecnología y arquitectura se configura entonces como un camino fructífero para construir el futuro de la salud.
Referencias
- Picard, R. W. (1997). Affective computing. Cambridge: MIT Press.
- Breazeal, C. (2003). Emotion and sociable humanoid robots. International Journal of Human-Computer Studies, 59(1-2), 119-155. https://doi.org/10.1016/S1071-5819(03)00018-1
- Dautenhahn, K. (2007). Socially intelligent robots: Dimensions of human-robot interaction. Philosophical Transactions of the Royal Society B: Biological Sciences, 362(1480), 679-704. https://doi.org/10.1098/rstb.2006.2004
- Tapus, A., Mataric, M., & Scassellatti, B. (2007). The grand challenges in socially assistive robotics. IEEE Robotics and Automation Magazine, 14(1). https://hal.science/hal-00770113v1
- Kolling, T., Baisch, S., Schall, A., Selic, S., Rühl, S., Kim, Z., Rossberg, H., Klein, B., Pantel, J., Oswald, F., & Knopf, M. (2016). What is emotional about emotional robotics? In S. Y. Tettegah & Y. E. Garcia (Eds.), Emotions, technology, and health (pp. 85-103). Academic Press. https://doi.org/10.1016/B978-0-12-801737-1.00005-6
- Paro Robots. (2014). PARO Therapeutic Robot. http://www.parorobots.com/
- Wada, K., Shibata, T., Saito, T., Sakamoto, K., & Tanie, K. (2005). Psychological and social effects of one year robot assisted activity on elderly people at a health service facility for the aged. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (pp. 2785-2790). IEEE. https://doi.org/10.1109/ROBOT.2005.1570535
- Sony Group Corporation. (2025). Aibo. https://us.aibo.com/
- SoftBank Robotics America (2025). Meet Pepper: The robot built for people. https://us.softbankrobotics.com/pepper
- Han, H., Kim, D. H., Nam, K. H., Lee, J. I., Kim, K.-H., Park, J.-H., & Ahn, H. S. (2024). Human–robot interaction and social robot: The emerging field of healthcare robotics and current and future perspectives for spinal care. Neurospine, 21(3), 868-877. https://doi.org/10.14245/ns.2448432.216
- Blue Frog Robotics. (2025). Buddy, the first smart, mobile and emotional robot at an affordable price. https://www.bluefrogrobotics.com/robot
- Groove X (2025). Lovot. https://lovot.life/en/
- Misty Robotics. (2025). Misty II. https://www.mistyrobotics.com/misty-ii
- Robinson, H., MacDonald, B., Kerse, N., & Broadbent, E. (2013). The psychosocial effects of a companion robot: A randomized controlled trial. Journal of the American Medical Directors Association, 14(9), 661-667. https://doi.org/10.1016/j.jamda.2013.02.007
- Shibata, T., & Wada, K. (2011). Robot therapy: A new approach for mental healthcare of the elderly – A mini‑review. Gerontology, 57(4), 378-386. https://doi.org/10.1159/000319015
- Petersen, S., Houston, S., Qin, H., Tague, C., & Studley, J. (2016). The utilization of robotic pets in dementia care. Journal of Alzheimer’s Disease, 55(2), 569-574. https://doi.org/10.3233/JAD-160703
- Sumioka, H., Nakae, A., Kanai, R., & Ishiguro, H. (2013). Huggable communication medium decreases cortisol levels. Scientific Reports, 3, Article 3034. https://doi.org/10.1038/srep03034
- Broadbent, E., Stafford, R., & MacDonald, B. (2009). Acceptance of healthcare robots for the older population: Review and future directions. International Journal of Social Robotics, 1, 319-330. https://doi.org/10.1007/s12369-009-0030-6
- Bemelmans, R., Gelderblom, G. J., Jonker, P., & de Witte, L. (2012). Socially assistive robots in elderly care: A systematic review into effects and effectiveness. Journal of the American Medical Directors Association, 13(2), 114-120. https://doi.org/10.1016/j.jamda.2010.10.002
- Kachouie, R., Sedighadeli, S., Khosla, R., & Chu, M. T. (2014). Socially assistive robots in elderly care: A mixed‑method systematic literature review. International Journal of Human-Computer Interaction, 30(5), 369-393. https://doi.org/10.1080/10447318.2013.873278
- Ulrich, R. S., Zimring, C., Zhu, X., DuBose, J., Seo, H.-B., Choi, Y.-S., Quan, X., & Joseph, A. (2008). A review of the research literature on evidence-based healthcare design. HERD: Health Environments Research & Design Journal, 1(3), 61-125. https://doi.org/10.1177/193758670800100306
- Verderber, S., & Fine, D. J. (2000). Healthcare architecture in an era of radical transformation. New Haven: Yale University Press.
João Paulo Lucchetta Pompermaier: Doctorando en el Programa de Posgrado en Arquitectura y Urbanismo (PósARQ) de la Universidad Federal de Santa Catarina (UFSC). Máster en Arquitectura y Urbanismo por la Universidad Federal de Santa Catarina (UFSC). Graduado en Arquitectura y Urbanismo por la Facultad Empresarial de Chapecó (FAEM/UCEFF). Miembro de la Associação Brasileira para o Desenvolvimento do Edifício Hospitalar (ABDEH) y Coordinador Técnico Científico de la Región de Santa Catarina.
joaopaulopompermaier@gmail.com
GIPHY App Key not set. Please check settings